上肢假肢發(fā)展與變革:從機(jī)械替代到人機(jī)融合的技術(shù)跨越
上肢假肢的發(fā)展始終圍繞“還原運(yùn)動(dòng)功能�、貼近自然感知”的核心目標(biāo)�,歷經(jīng)機(jī)械驅(qū)動(dòng)、電子控制到智能仿生的三次技術(shù)革命����,逐步實(shí)現(xiàn)從“工具適配”到“身體延伸”的跨越。以下從技術(shù)演進(jìn)階段與核心突破展開(kāi)解析�����。
一���、機(jī)械索控時(shí)代:功能替代的初步探索(20世紀(jì)80年代前)
1. 技術(shù)原理:通過(guò)肩背帶牽引索傳遞運(yùn)動(dòng)力�,控制手部開(kāi)合與關(guān)節(jié)屈伸��,分為隨意張開(kāi)式(彈簧驅(qū)動(dòng)閉合)和隨意閉合式(主動(dòng)控制握力)兩類(lèi)����,核心依賴(lài)人體殘余肢體的機(jī)械運(yùn)動(dòng)傳導(dǎo) 。
2. 代表成果:1921年發(fā)明的“都柏林臂”采用爆燈藍(lán)鎖裝置,通過(guò)蠶絲纜繩連接肌肉運(yùn)動(dòng)�����,實(shí)現(xiàn)抓握等基礎(chǔ)動(dòng)作���,為機(jī)械假肢奠定結(jié)構(gòu)基礎(chǔ)��;我國(guó)傳統(tǒng)索控式機(jī)械手以骨骼式結(jié)構(gòu)為主��,具備零位自鎖功能�����,適配腕離斷至上臂截肢患者��。
3. 局限與突破:僅能完成2-3種固定動(dòng)作�����,握力無(wú)法精準(zhǔn)調(diào)控,且肩背帶易造成壓迫損傷�����,但其模塊化設(shè)計(jì)理念為后續(xù)技術(shù)提供了參考。
二�����、肌電控制時(shí)代:電子驅(qū)動(dòng)的精準(zhǔn)升級(jí)(20世紀(jì)80年代-2020年)
1. 核心技術(shù):采集殘肢肌肉收縮產(chǎn)生的肌電信號(hào)�,經(jīng)處理器轉(zhuǎn)化為假肢動(dòng)作指令,實(shí)現(xiàn)“意念-信號(hào)-動(dòng)作”的直接聯(lián)動(dòng)�����,信號(hào)識(shí)別準(zhǔn)確率可達(dá)95%以上��。
2. 臨床應(yīng)用:奧托博克8E38梅奧加速感應(yīng)肌電手集成SUVA感應(yīng)系統(tǒng)���,通過(guò)指間傳感器感知物體滑落趨勢(shì)并自動(dòng)調(diào)增握力����,可安全抓取雞蛋等易碎物品�����,且重量輕�、抗干擾能力強(qiáng),適配腕離斷患者 ���。
3. 技術(shù)特征:實(shí)現(xiàn)2-3個(gè)主動(dòng)自由度��,支持握取�、勾取等精細(xì)化動(dòng)作,配合鋰電池供電����,單次充電可滿足全天使用需求,解決了傳統(tǒng)機(jī)械假肢的操作局限�����。

三�����、智能仿生時(shí)代:感知融合的革命性突破(2021年至今)
1. 神經(jīng)接口創(chuàng)新:《Science Robotics》2025年研究提出磁感肌動(dòng)系統(tǒng)���,通過(guò)殘肢肌肉內(nèi)植入2毫米直徑磁體���,利用磁場(chǎng)變化解析運(yùn)動(dòng)意圖,在人類(lèi)受試者中實(shí)現(xiàn)手掌開(kāi)合�、力度控制等連續(xù)動(dòng)作����,延遲較肌電系統(tǒng)降低40% �。
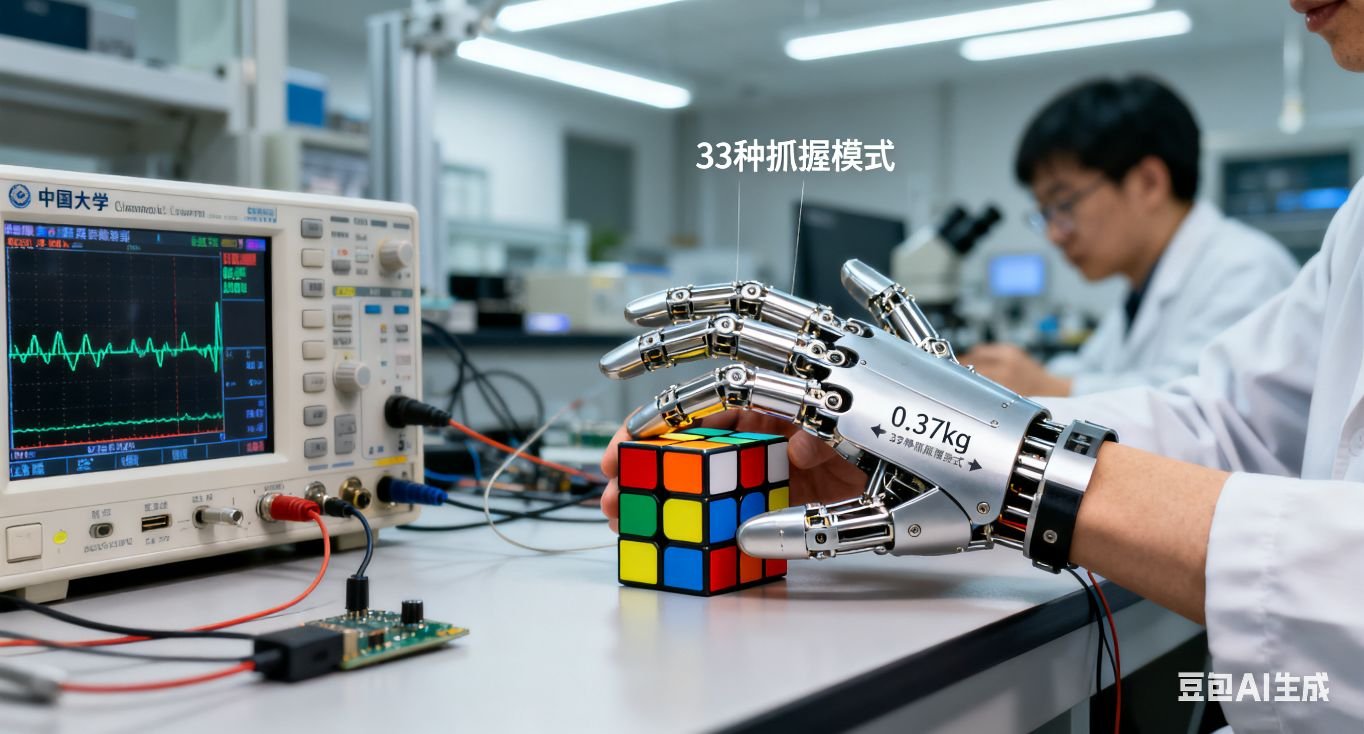
2. 高自由度與觸覺(jué)反饋:中國(guó)科大2025年推出的醫(yī)療級(jí)仿生手����,以形狀記憶合金為人工肌肉,實(shí)現(xiàn)19個(gè)主動(dòng)自由度�����,重僅0.37千克�,可復(fù)現(xiàn)33種抓握動(dòng)作;配合解兆謙團(tuán)隊(duì)的觸覺(jué)皮膚器件�����,能通過(guò)振動(dòng)反饋傳遞物體硬度與紋理信息�����,讓患者精準(zhǔn)感知抓取力度 ��。
3. 國(guó)產(chǎn)化與政策落地:強(qiáng)腦科技BrainCo智能仿生手實(shí)現(xiàn)量產(chǎn)���,價(jià)格降至十余萬(wàn)元(僅為海外同類(lèi)產(chǎn)品的1/3-1/5)�����,浙江已將其納入醫(yī)保��,報(bào)銷(xiāo)比例達(dá)50%��,推動(dòng)高端假肢普及��。
總結(jié)
上肢假肢已從“機(jī)械工具”進(jìn)化為“人機(jī)協(xié)同系統(tǒng)”�,神經(jīng)接口與觸覺(jué)反饋技術(shù)正打破“有動(dòng)作無(wú)感知”的壁壘。未來(lái)隨著材料輕量化(如碳纖維復(fù)合材)與AI算法優(yōu)化�,有望實(shí)現(xiàn)更自然的動(dòng)作預(yù)判與感官融合,而政策支持將加速尖端技術(shù)的臨床落地�。
本文整合自
1. 抖音百科《索控式上肢假肢》(2025)
2. 抖音視頻《1921年都柏林臂假肢技術(shù)革新》(2023)
3. 奧托博克中國(guó)《8E38梅奧加速感應(yīng)肌電手技術(shù)手冊(cè)》(2025)
4. 網(wǎng)易手機(jī)網(wǎng)《磁感操控的腦機(jī)接口新突破》(2025)
5. 抖音視頻《全球首款觸覺(jué)靈巧手》(2025)
6. 科學(xué)網(wǎng)《他們讓觸覺(jué)不斷延伸》(2024)
7. 抖音視頻《中國(guó)腦機(jī)企業(yè)推動(dòng)仿生假肢價(jià)格下探》(2025)
8. 人人文庫(kù)《2025至2030年假肢關(guān)節(jié)項(xiàng)目投資價(jià)值分析報(bào)告》(2025)
本文科普內(nèi)容與圖片均由豆包AI(2025年9月26日生成)提供支持
